SSD: Single Shot MultiBox Detector
图1: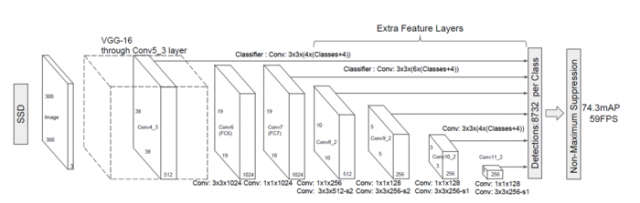
图2: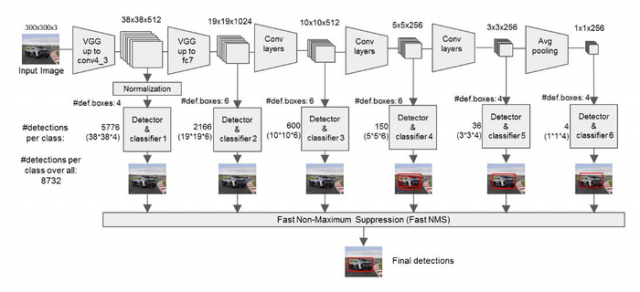
算法步骤:
1、输入一幅图片(300x300),将其输入到预训练好的分类网络中来获得不同大小的特征映射,修改了传统的VGG16网络;
2、抽取Conv4_3、Conv7、Conv8_2、Conv9_2、Conv10_2、Conv11_2层的feature map,然后分别在这些feature map层上面的每一个点构造6个不同尺度大小的bbox,然后分别进行检测和分类,生成多个bbox,如图2所示;
3、将不同feature map获得的bbox结合起来,经过NMS(非极大值抑制)方法来抑制掉一部分重叠或者不正确的bbox,生成最终的bbox集合(即检测结果);
(1)多尺度特征映射
SSD算法中使用到了conv4_3,conv_7,conv8_2,conv7_2,conv8_2,conv9_2,conv10_2,conv11_2这些大小不同的feature maps,其目的是为了能够准确的检测到不同尺度的物体,因为在低层的feature map,感受野比较小,高层的感受野比较大,在不同的feature map进行卷积,可以达到多尺度的目的。
Why?:我们将一张图片输入到一个卷积神经网络中,经历了多个卷积层和池化层,我们可以看到在不同的卷积层会输出不同大小的feature map(这是由于pooling层的存在,它会将图片的尺寸变小),而且不同的feature map中含有不同的特征,而不同的特征可能对我们的检测有不同的作用。总的来说,浅层卷积层对边缘更加感兴趣,可以获得一些细节信息,而深层网络对由浅层特征构成的复杂特征更感兴趣,可以获得一些语义信息,对于检测任务而言,一幅图像中的目标有复杂的有简单的,对于简单的patch我们利用浅层网络的特征就可以将其检测出来,对于复杂的patch我们利用深层网络的特征就可以将其检测出来,因此,如果我们同时在不同的feature map上面进行目标检测,理论上面应该会获得更好的检测效果。
(2)Defalut box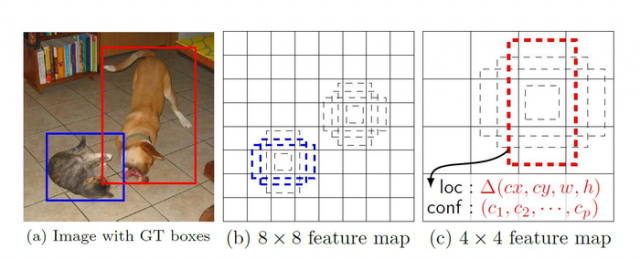
如上图所示,在特征图的每个位置预测K个bbox,对于每一个bbox,预测C个类别得分,以及相对于Default box的4个偏移量值,这样总共需要 (C+4)×K个预测器,则在m×n的feature map上面将会产生 (C+4)×K×m×n个预测值。
分析: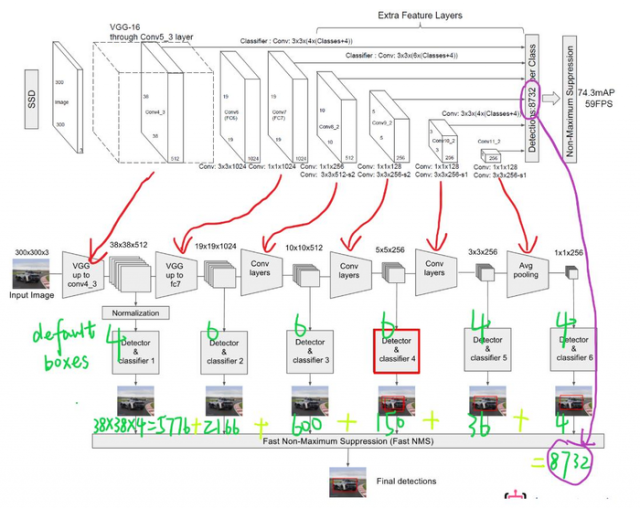
SSD中的Defalut box和Faster-rcnn中的anchor机制很相似。就是预设一些目标预选框,后续通过softmax分类+bounding box regression获得真实目标的位置。对于不同尺度的feature map 上使用不同的Default boxes。如上图所示,我们选取的feature map包括38x38x512、19x19x1024、10x10x512、5x5x256、3x3x256、1x1x256,Conv4_3之后的feature map默认的box是4个,我们在38x38的这个平面上的每一点上面获得4个box,那么我们总共可以获得38x38x4=5776个;同理,我们依次将FC7、Conv8_2、Conv9_2、Conv10_2和Conv11_2的box数量设置为6、6、6、4、4,那么我们可以获得的box分别为2166、600、150、36、4,即我们总共可以获得8732个box,然后我们将这些box送入NMS模块中,获得最终的检测结果。
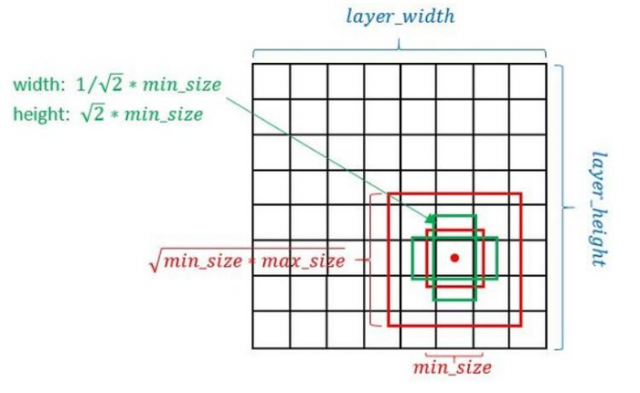
Defalut box生成规则:

loss函数分为两部分:计算相应的default box与目标类别的confidence loss以及相应的位置回归。
其中N是match到Ground Truth的default box数量;而alpha参数用于调整confidence loss和location loss之间的比例,默认alpha=1。
位置回归则是采用 Smooth L1 loss,loss函数为: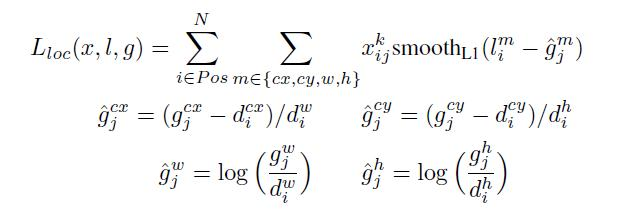
confidence loss是典型的softmax loss:
本文链接:http://task.lmcjl.com/news/5881.html


