目录
-
相关背景
-
从传统方法到R-CNN
-
从R-CNN到SPP
-
Fast R-CNN
-
Faster R-CNN
-
YOLO
-
SSD
-
总结
-
参考文献
-
推荐链接
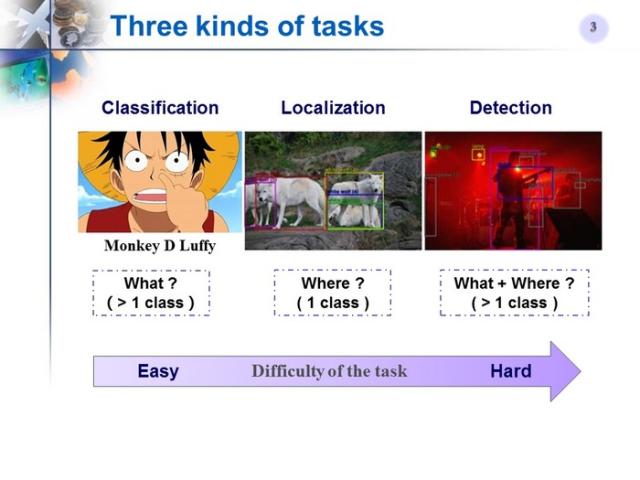
相关背景
-
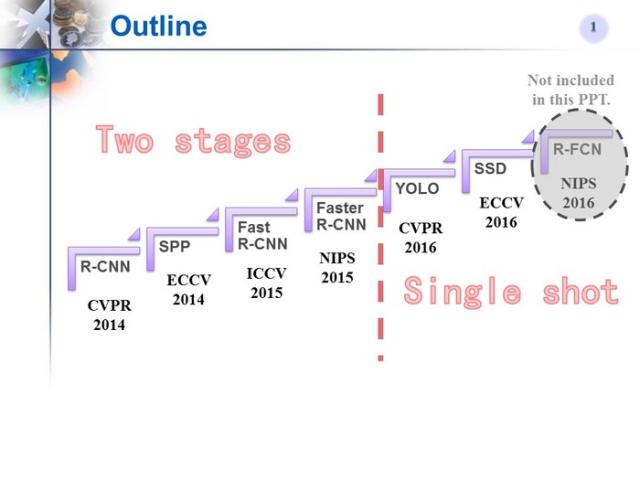
14年以来的目标检测方法(以R-CNN框架为基础或对其改进)
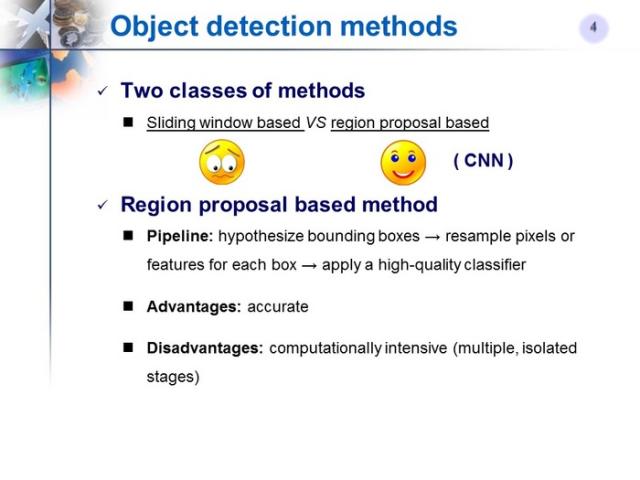
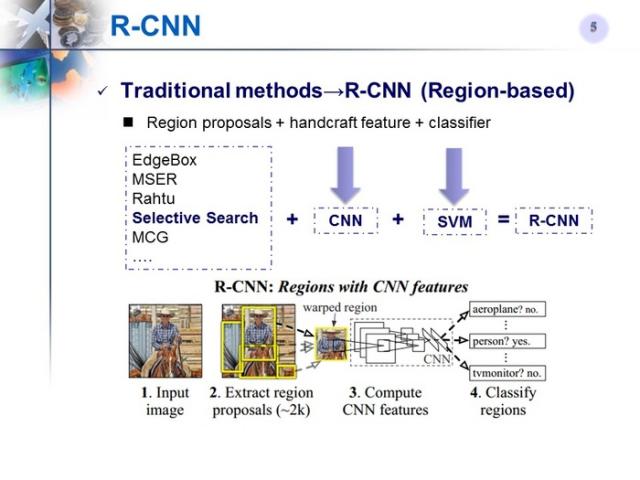
从传统方法到R-CNN
-
R-CNN的三大步骤:得到候选区域,用cnn提取特征,训练分类器(后两步放在一个网络中,用softmax做分类器也可以)
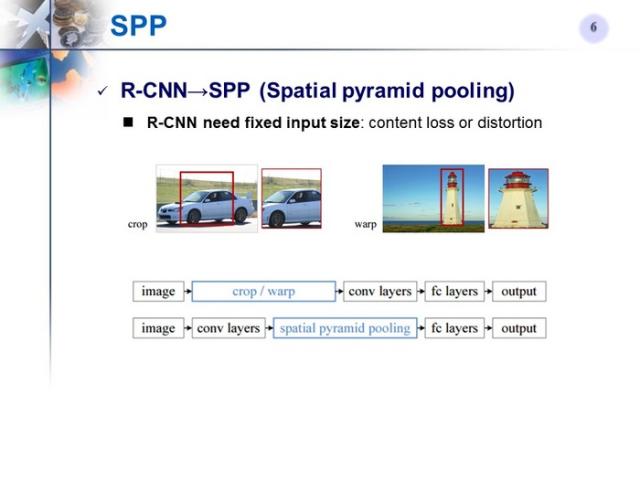
从R-CNN到SPP
-
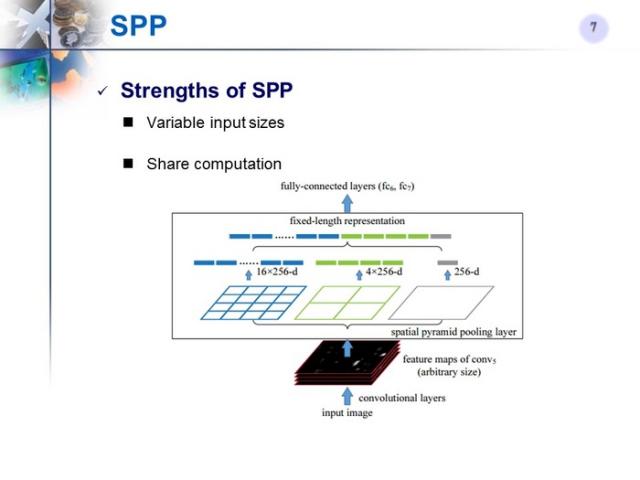
SPP的两大优势:可变输入大小 + 各patch块之间卷积计算是共享的
-
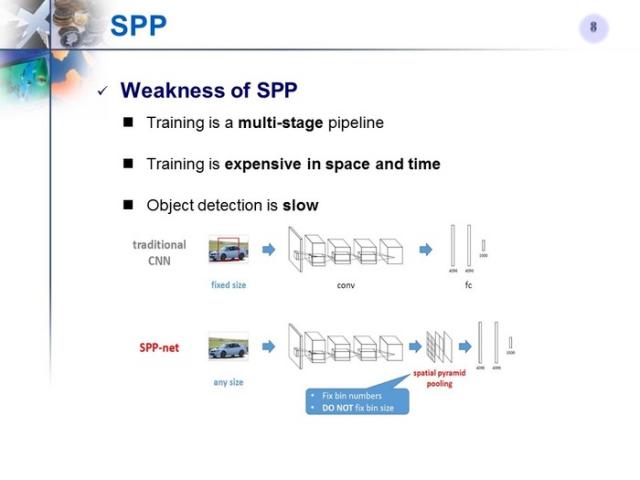
SPP的缺陷:multi-stage,训练和测试都比较慢
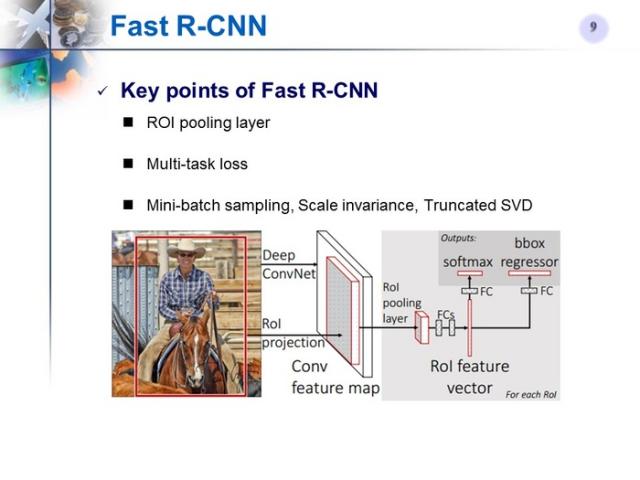
Fast R-CNN
-
Fast R-CNN通过ROI pooling(一层的SPP),multi-task等改进大大提高速度
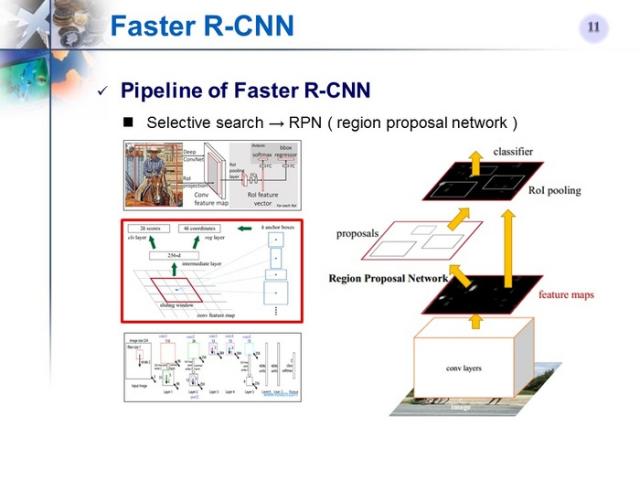
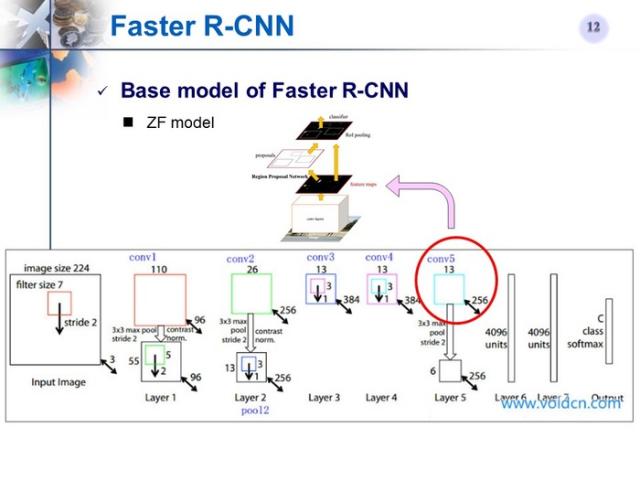
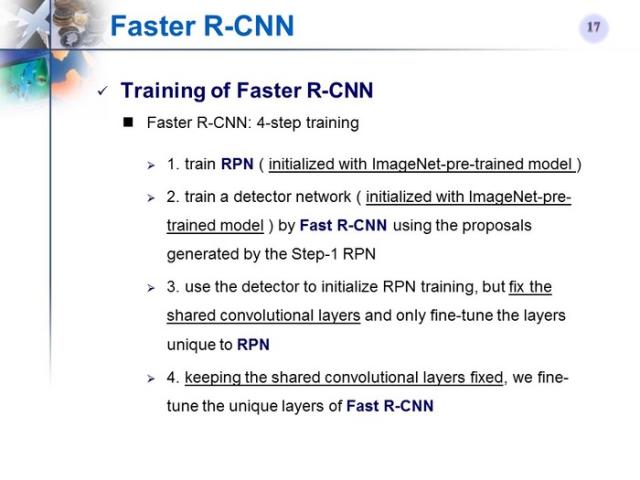
Faster R-CNN
-
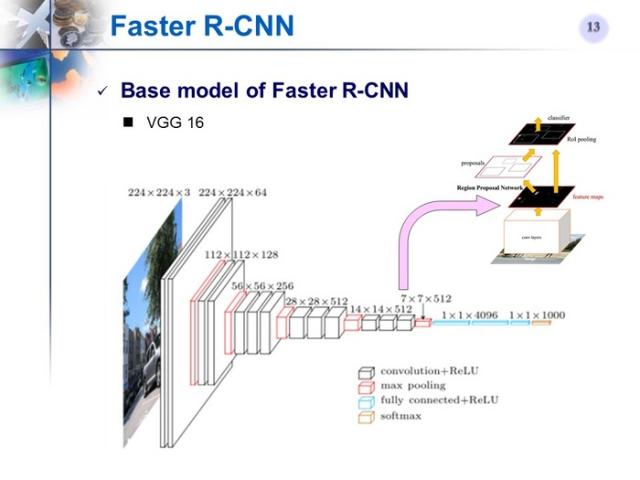
Faster R-CNN对于Fast R-CNN的改进在于把region proposal的步骤换成一个CNN网络(RPN)
-
Faster R-CNN的两个base model: ZF,VGG16 (base model的中间conv输出即为要输入到RPN的那个feature map)
-
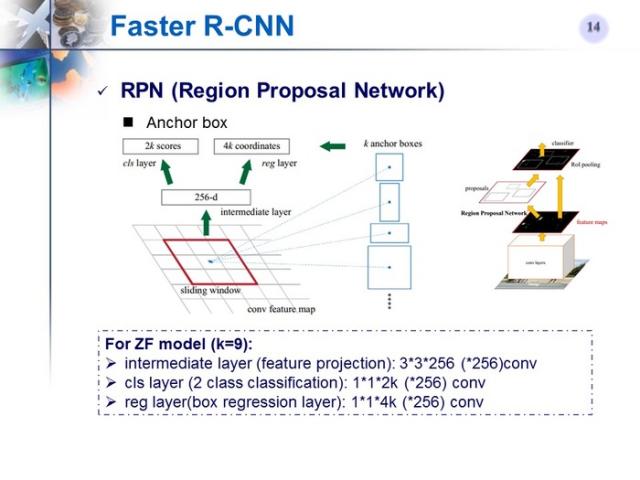
Faster R-CNN的锚点anchor box
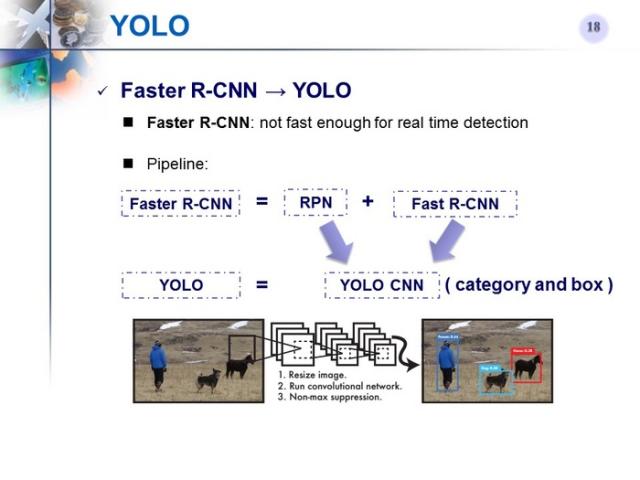
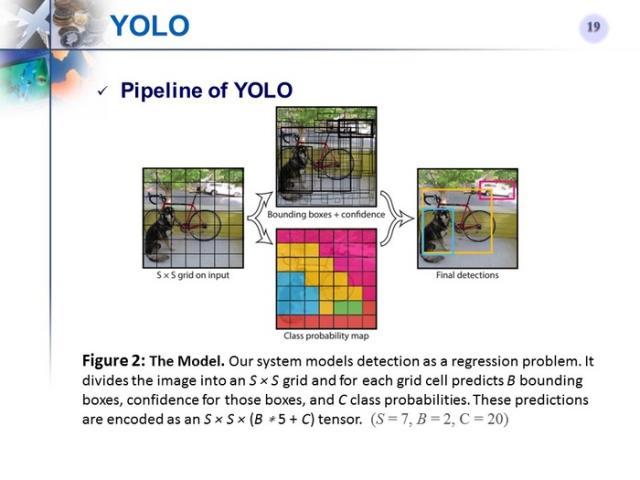
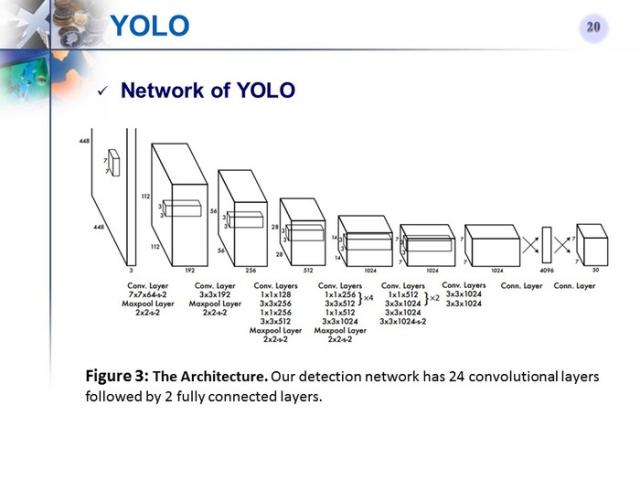
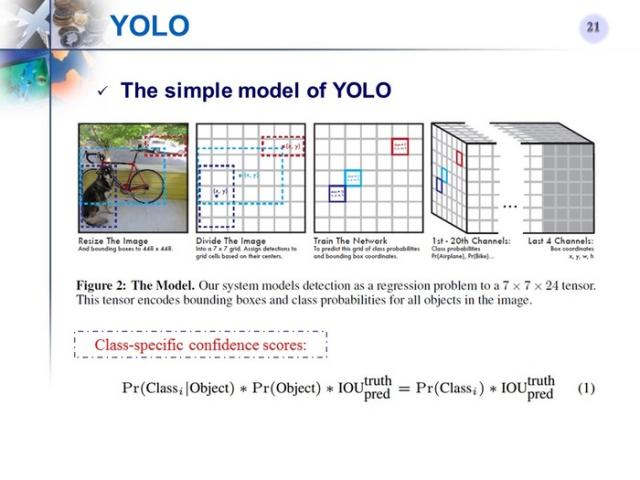
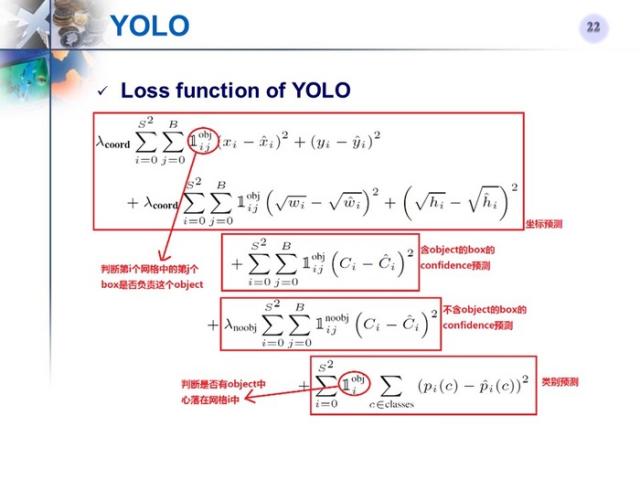
YOLO
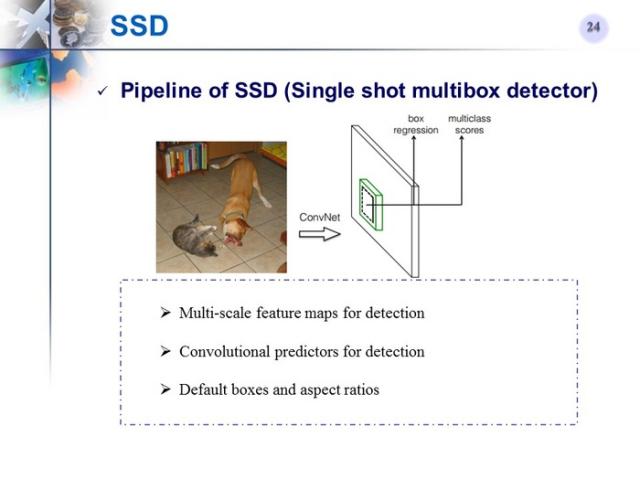
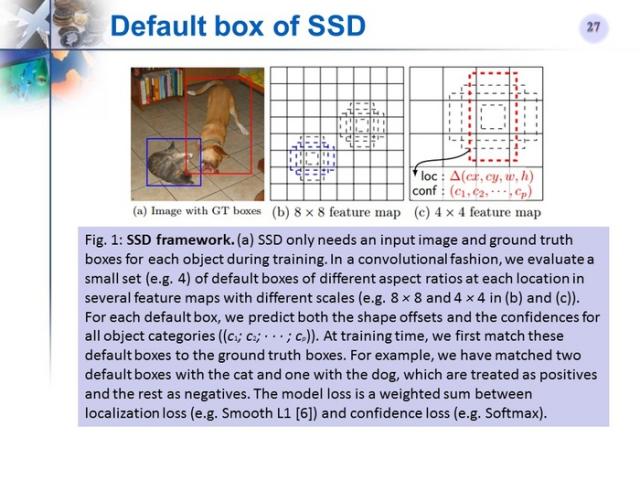
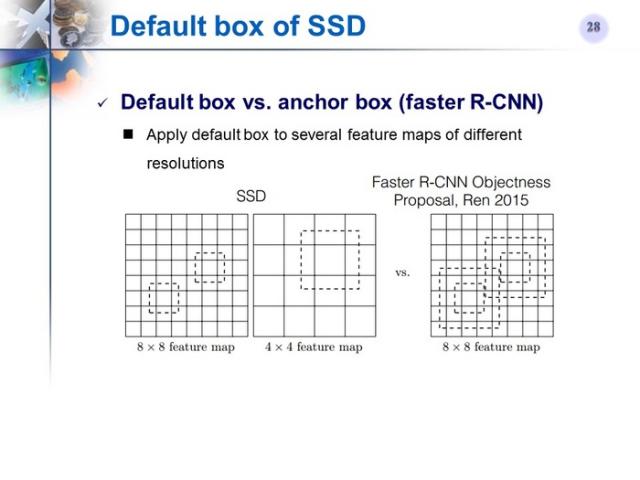
SSD
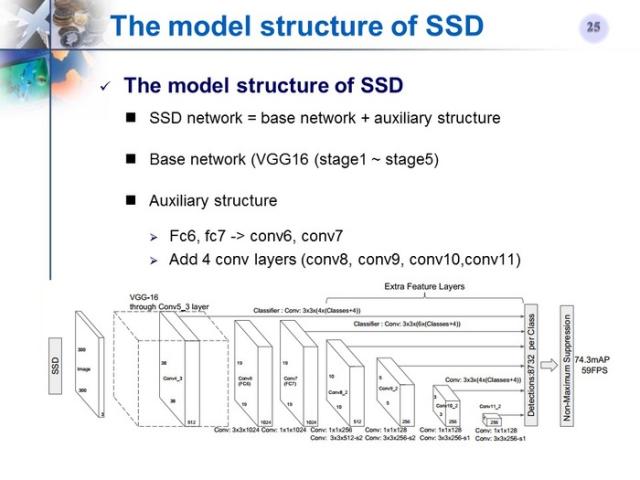
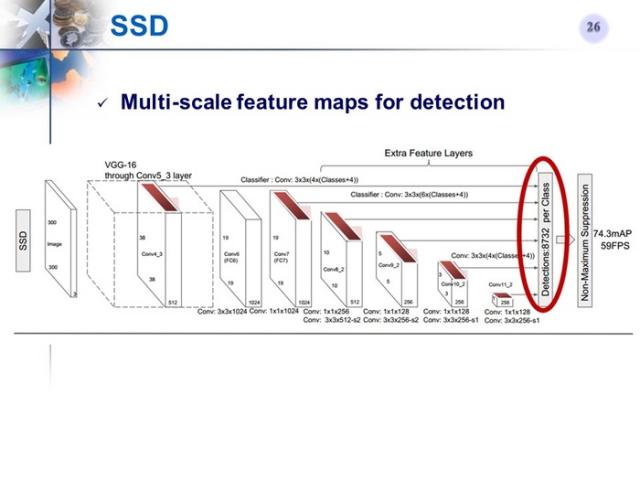
-
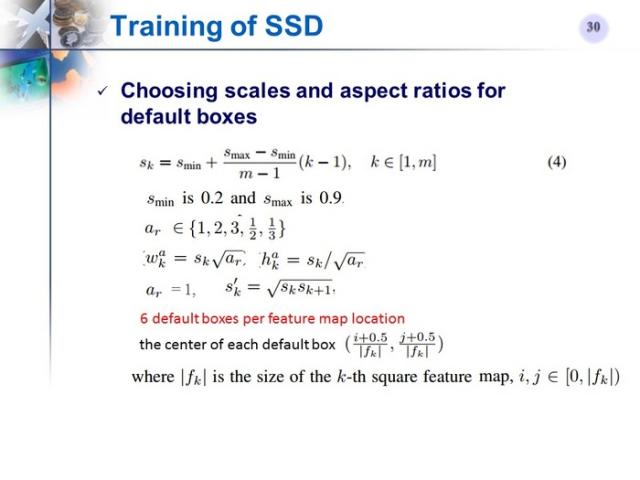
SSD的default box与faster r-cnn的anchor box的对比
-
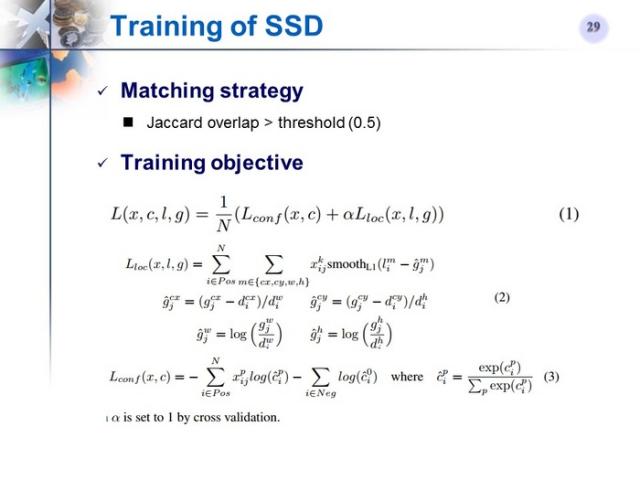
SSD的训练样本与groundTruth的匹配策略 + 损失函数
总结
-
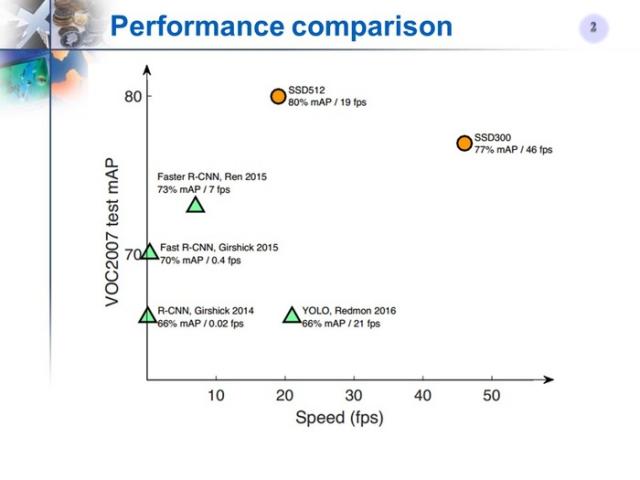
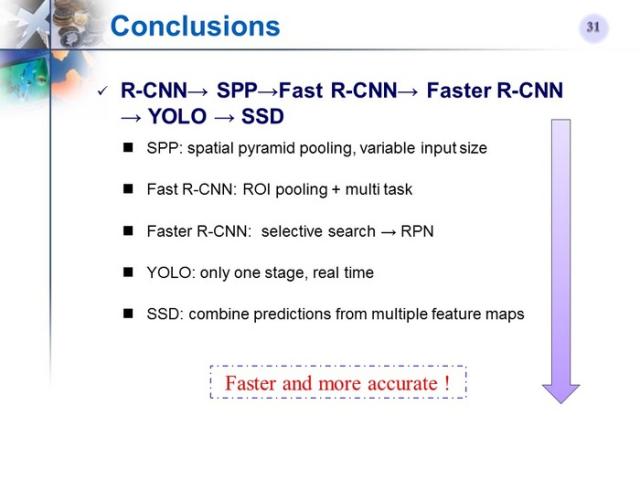
从R-CNN → SPP → Fast R-CNN → Faster R-CNN → YOLO → SSD整体在准确率和速度上都在提高
参考文献
-
-
- Girshick, R., Donahue, J., Darrell, T., Malik, J.: Rich feature hierarchies for accurate object detection and semantic segmentation. In: CVPR. (2014)
-
SPP
-
- He, K., Zhang, X., Ren, S., Sun, J.: Spatial pyramid pooling in deep convolutional networks for visual recognition. In: ECCV. (2014)
-
Fast R-CNN
-
- Girshick, R.: Fast R-CNN. In: ICCV. (2015)
-
Faster R-CNN
-
- Ren, S., He, K., Girshick, R., Sun, J.: Faster R-CNN: Towards real-time object detection with region proposal networks. In: NIPS. (2015)
-
YOLO
-
- Redmon, J., Divvala, S., Girshick, R., Farhadi, A.: You only look once: Unified, real-time object detection. In: CVPR. (2016)
-
SSD
-
- W. Liu, D. Anguelov, D. Erhan, C. Szegedy, and S. Reed. SSD: Single shot multibox detector. arXiv:1512.02325v2, 2015
推荐链接
-
Object detection methods (codes)
-
所有目标检测方法的中文总结(博客)
-
Faster RCNN的论文阅读
-
YOLO的论文阅读
-
R-FCN的论文阅读
-
SSD的论文阅读
本文链接:http://task.lmcjl.com/news/12152.html


