办公任务系统
行业管理经验者研发品牌
办公任务分配系统,无需安装,能上网,就能轻松管理!
登录/注册
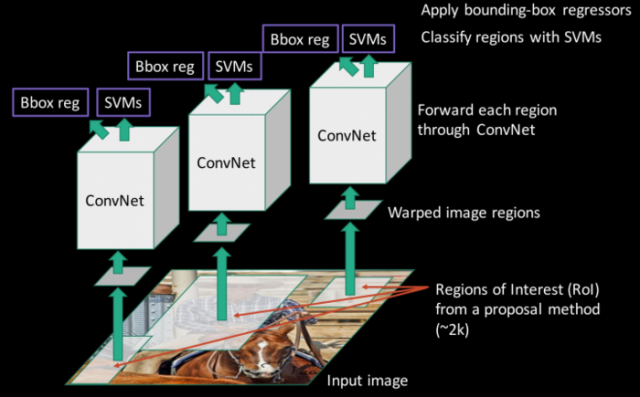
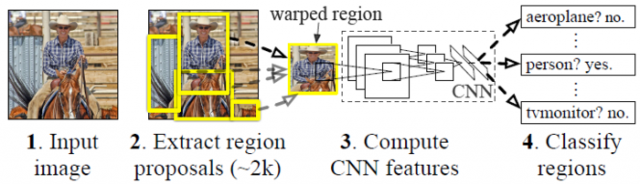
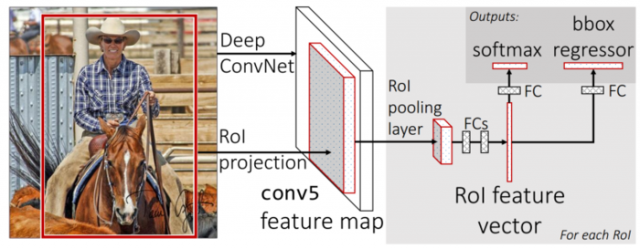
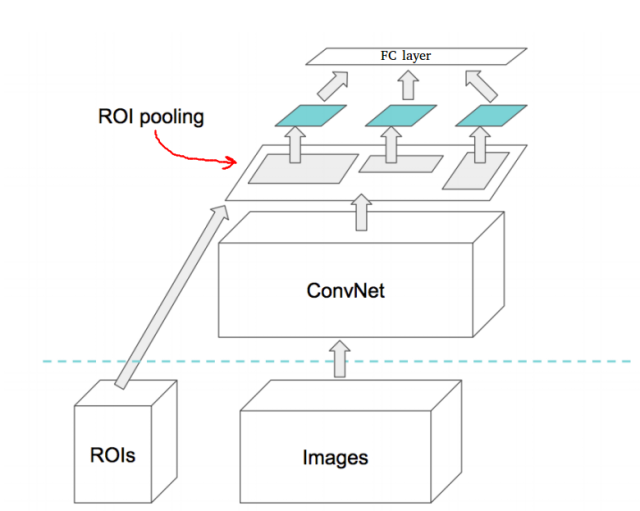
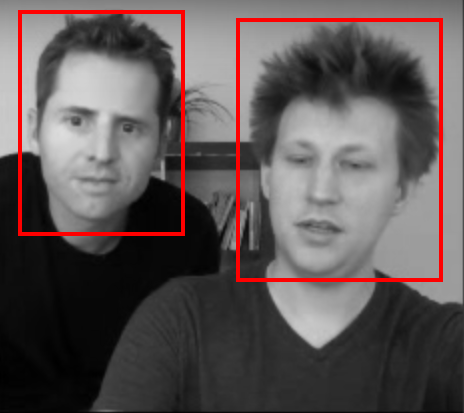
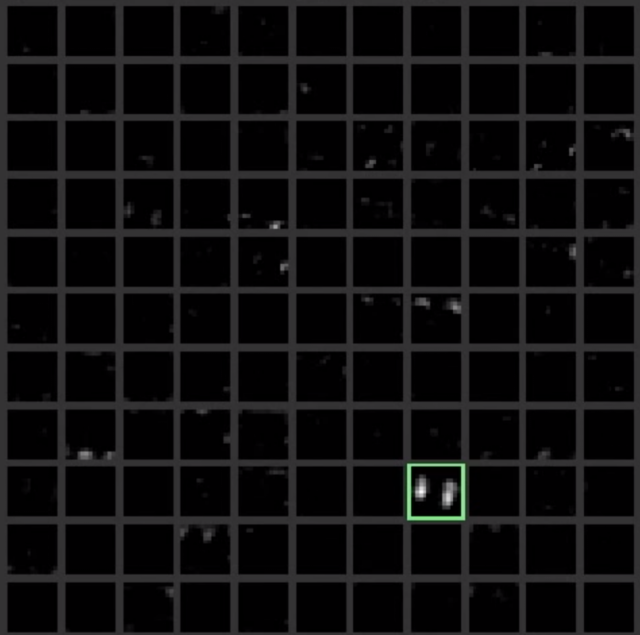
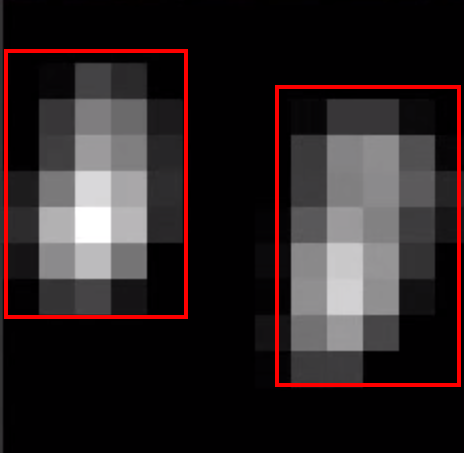
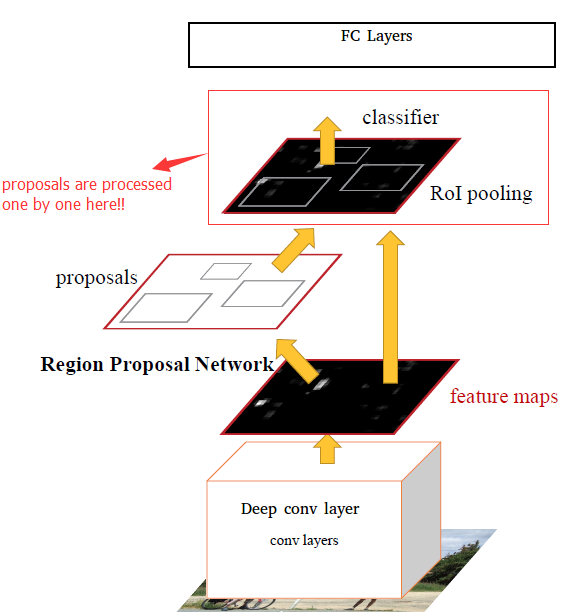
例如:对于输入图像:候选区域:最后一个卷积层:放大归一尺寸的候选区域的特征:和
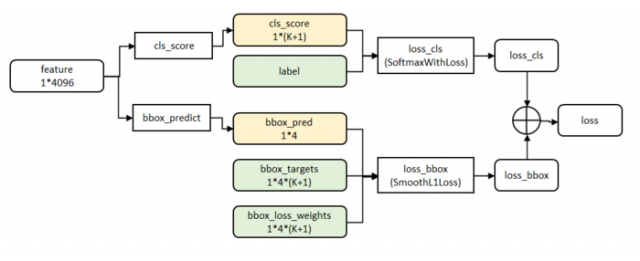
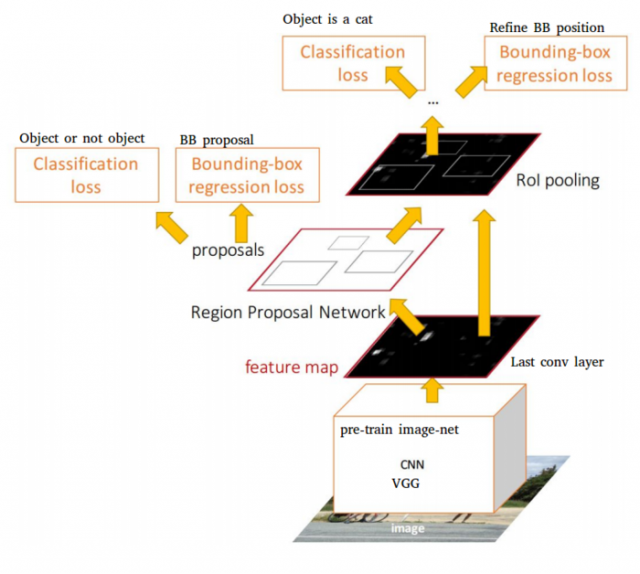
主要思想是使用最后一个卷积层来得到候选区域,faster RCNN相当于:候选区域生成网络+fast RCNN。
本文链接:http://task.lmcjl.com/news/12314.html