有些博客不懂乱说,例如知乎上的一篇文章,上来就说最后一层的featuremap对应的就是前面分好的网格里面的格子的特征,可见对感受野的概念不是很理解,其实这里的想法和Faster R-CNN里面的概念比较像,anchor其实也是在原图上滑动的呀,只是说这里没有anchor,而是这里的featuremap上的像素对应的是一个格子,也不能说是格子,因为格子的作用和anchor也是非常类似的,作用都是来进行分配任务,教网络怎么预测,网络学的是什么,那么预测的也是什么了。只是说这里是根据中心点是不是落在网络里面来选择正样本,而RPN里面是根据和anchor的IOU的大小来规定哪个是正样本哪个是负样本。
只是这里说的比较明确,说是把原图分割成最后一层feature map大小的个数,feature map是多少个像素,那么就分成几个格子。
只是说Faster R-CNN里面好像没有明确提到anchor的中心点在原图的哪个地方。其实这也是我们规定哪个点就是哪个点,但是按照感受野的概念,感受野中心的区域的权重往往会高一点,所以anchor的中心点可以设置成格子的中心。所以anchor的中心点在原图的坐标经过换算一下也是很简单的。应该就是(x*stride + stride/2, y*stride + stride/2),这里的x和y表示在feature map上的坐标,计算出来的表示原图上的坐标,这也是我自己推测的(代码还没看过)。
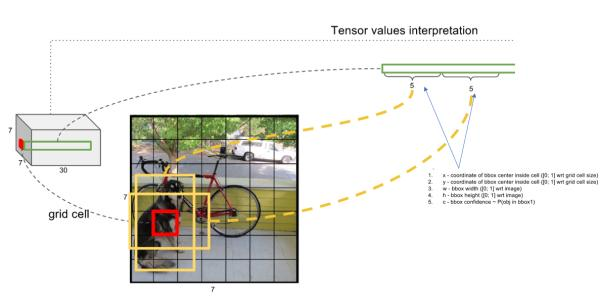
每个格子预测坐标(x,y,w,h)+ 置信度(是否有目标,有、没有)+ 类别(class):
* 置信度=Pr(Object)+ IOU,这是论文里面说的,iou论文里面是说预测的和真实的。但是没有预测哪里来的iou,所以做数据的是置信度就是有目标是1,没有目标是0,不用多想这里的置信度就是有没有目标,就是0和1。
* 坐标:宽和高是相对于图像大小的,中心点是相对于格子的的。
* 类别:是哪个类别
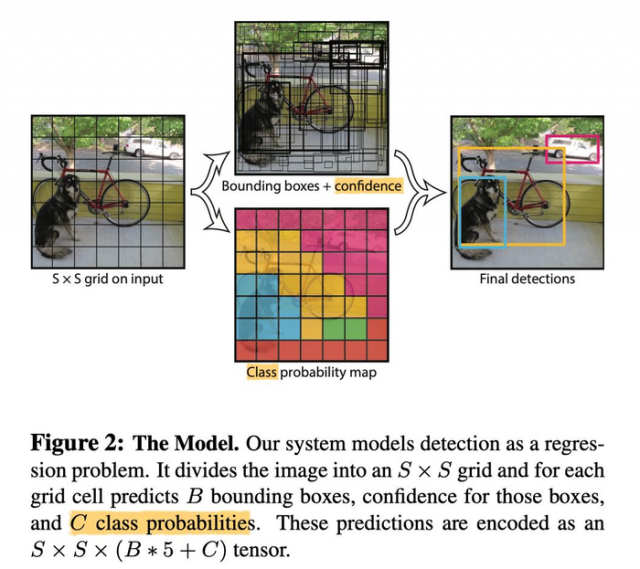
置信度和坐标是绑定在一起的,类别是独立的。例如一个格子检测两个目标,那么就有两组坐标和对应的置信度,但是类别可以是有20个。但是这样有个问题,就是如果两个框都是有目标,那么怎么知道哪个框是哪个类别的目标呢? 是不是这里的意思就是一个格子就只能预测一个类别,但是可以有两个包围框预测,最后应该是看哪个包围框更准(置信度高,即是目标的概率高)就选哪个?确实和我想的一样,两个包围框都是预测一个类别的(见引用)。如图所示:
Fast R-CNN最后只是有一个类别和坐标,但是他的类别里面是包含背景的,yolo的类别里面是不包含背景。
下面这幅图终于看懂了,Class probability map确实只是class,但这里只是表示这个格子预测的目标是哪个类(就是目标中心对于的框的目标),下面这个图片的Class probability map画的应该是预测出来的,那么做数据的时候是怎么做的。。。如果没有目标那么类别是什么?即使不计算loss那也总要填一个值吧。这里好像又没有背景这个类别。
这个应该是预测时候的示意图。
通常没有目标的区域比较多,而有目标的区域少,所以坐标的回归在loss里面占的比重很少,所以为了减少这种不平衡,将非目标的置信度回归的权重减少。
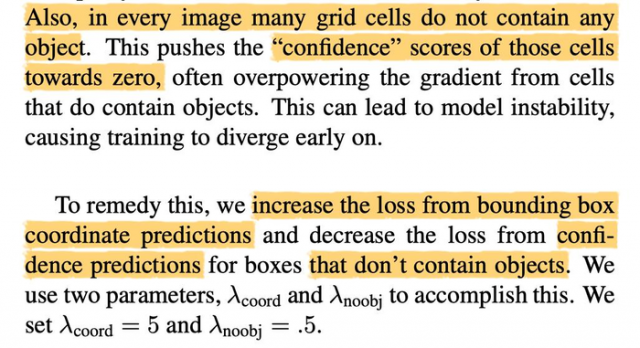

这个长的像1的系数表示有目标的适合是1,没有的适合是0。那头上写的是noobj的时候就反一下。这里大写的C表示confidence置信度。p那个表示类别。计算不是目标的置信度的适合权重设置为0.5 。
根号的作用: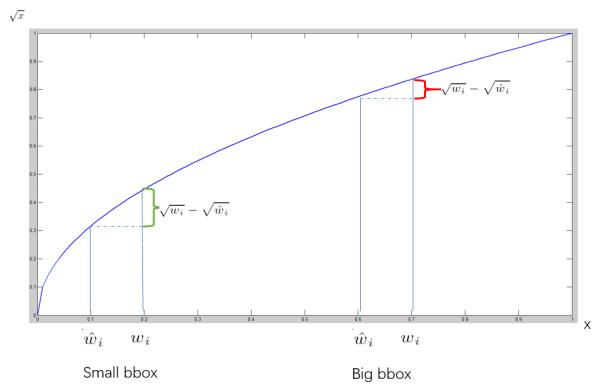
本文链接:http://task.lmcjl.com/news/5957.html


